بازوی مصنوعی رباتیک برای ناتوانان
بازوی مصنوعی چیست؟ طراحی بازوی مصنوعی رباتیک برای ناتوانان به چه صورتی انجام می شود؟ محققان دانشگاه میشیگان امریکا در جدیدترین تحقیقات خود توانستند از موتورهایی که در بازوی مصنوعی رباتیک در ایستگاه فضایی بین المللی استفاده می شده در پروتز رباتیک اندام پا ، استفاده کنند. استفاده از این موتورها در پروتز پا ، باعث شده که حرکت پروتز بسیار نرم تر و طبیعی تر انجام گیرد . همچنین استرس کمتری در قسمت باسن کاربر ایجاد گردد و انرژی بیشتری در اختیار کاربر قرار گیرد.
یکی از دستگاه های مفید در جهت انتقال بیماران ، بالابر بیمار می باشد.
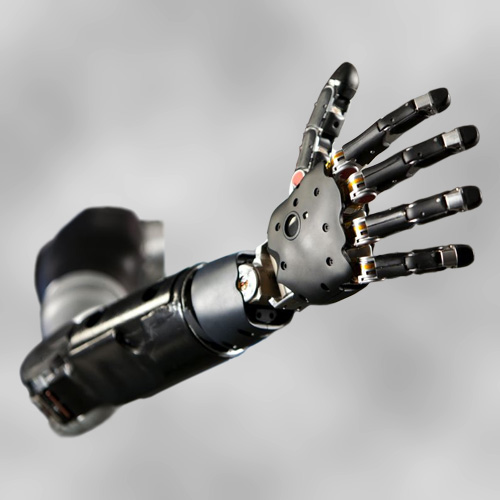
پژوهشگران دانشگاه John Hopkins بازوبند حسگر ماهیچۀ Myo را برای کنترل یک بازوی مصنوعی رباتیک بکار گرفتهاند و بازوی مصنوعی رباتیک را به یک بازوی کنترل شونده با حرکت اشاره تبدیل کردهاند که بدون اجزای الکترونیک کار میکند. با بکارگیری بازوبند Myo و بازوی مصنوعی رباتیک بیماران میتوانند با فکر کردن بازو را کنترل کنند. یک جفت بازوبند Myo در بالای بازو بکار گرفته میشود که پس از تشخیص پالسهای الکتریکی در ماهیچههای بازو، آنها را به صورت بیسیم به یک رایانه میفرستد. رایانه این حرکتها را درک کرده و به بازوی مصنوعی متصل شده دستور میدهد تا آن وظیفه را انجام دهد. عملکرد بازوی کنترل شونده با Myo را در فیلم زیر مشاهده کنید.
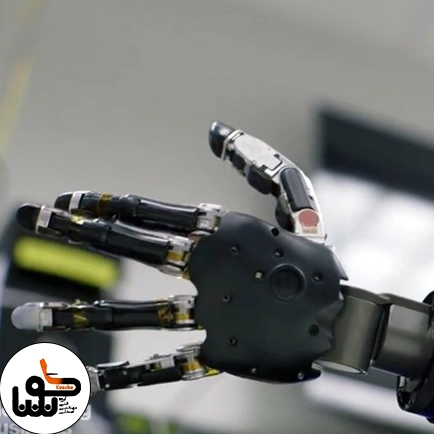
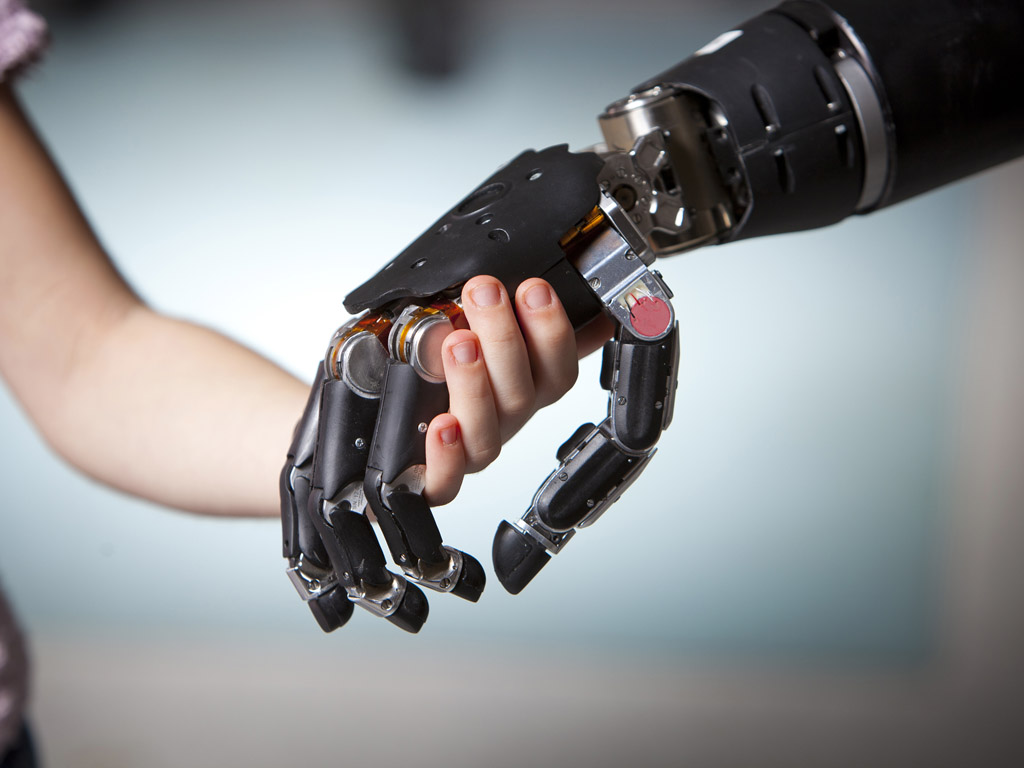
دست یکی از مهمترین اعضای بدن انسان است که میتوان به کمک آن به انجام کارهای مختلف از قبیل عمل جراحی، بررسی و معاینه، اکتشاف و مواردی از این قبیل پرداخت. قطع عضو از ناحیه دست دو مشکل مهم را به وجود میآورد: کاهش شدید عملکرد آن اندام برای انجام کارهایی از قبیل برداشتن اجسام و حمل کردن آنها و مشکلات روانی ناشی از قطع عضو. در ۳۰ سال گذشته انواع مختلفی از پروتز دست مصنوعی طراحی شده است و همچنان تحقیقات بر روی آن ادامه دارد. تحقیقات نشان داده که در ۳۰ تا ۵۰ درصد بیماران قطع عضو از ناحیه دست، از پروتز خود استفاده نمیکنند.
به منظور رفع محدودیتهای حاصل از پروتزهای فعلی و افزایش مطابقت پذیری پروتز مصنوعی باید پروتز دست مصنوعی به نحوی طراحی شود که تا حد امکان از لحاظ زیبایی ظاهری، قابلیت کنترل و برداشتن اشیا شبیه دست واقعی به نظر برسد و بتواند تمامی کاربردهای یک دست واقعی از قبیل اکتشاف، انجام فعالیتهای جسمانی و مواردی از این قبیل را شبیه سازی کند.